




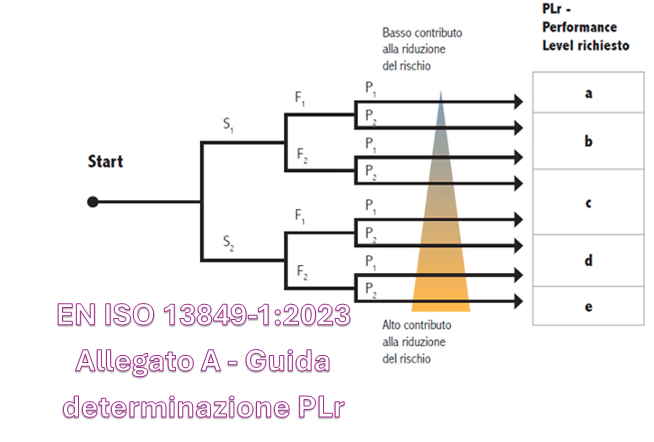
In riferimento alla nuova EN ISO 13849-1:2023, non ancora armonizzata per la Direttiva 2006/42/CE, nel presente articolo si illustra l’Allegato A della stessa, sulla determinazione del PLr, significativamente aggiornato rispetto a quello dell’Edizione 2015, di cui di seguito, se ne evidenziano brevemente le novità.
Nella precedente edizione la probabilità di evitare il pericolo e la probabilità che si verifichi un evento pericoloso erano entrambe combinate nel parametro P.
Nella presente edizione, i parametri “possibilità di evitare il pericolo o di limitare il danno” (parametro P) e “probabilità che si verifichi un evento pericoloso” non vengono più accorpati. Difatti, il parametro “probabilità che si verifichi un evento pericoloso” è adesso solo menzionato e, a favore di sicurezza, è generalmente stimato come elevato (100%).
Nei casi in cui la valutazione risulti “bassa”, il PLr determinato tramite il grafico del rischio, può essere declassato di un livello ed in questo caso, la decisione deve essere giustificata e documentata.
Nella nuova edizione, il parametro P, viene determinato in base a cinque fattori, ovvero:
1. utilizzo della macchina da parte di persona esperta/non esperta
2. la velocità con cui si manifesta la situazione pericolosa
3. possibilità di evitare il pericolo in termini di spazio
4. percettibilità del pericolo (ad es. superficie calda/fredda, radiazioni non ionizzanti, ecc.)
5. complessità delle operazioni (interazione umana in termini di numero di operazioni e/o tempistiche disponibili per tali operazioni).
I fattori 2., 3. e 4. se hanno valori tali da rientrare nella colonna C (rischio alto) della Tabella A.1, sono sufficienti da soli a determinare l’assegnazione di P2 (ovvero scarsamente possibile evitare o limitare il danno).
Gli altri due fattori, ovvero 1. e 5., non rientrando nella colonna C (rischio alto) della Tabella A.1, giustificano la scelta di P2 unicamente se utilizzati in combinazione con altri fattori.
Riportiamo di seguito alcuni estratti dalla norma:
“A.3.3 Possibility of avoiding or limiting harm, P1 and P2
It is important to know whether a hazardous event can be recognized before it can cause harm and be avoided. For example, can the exposure to a hazard be directly identified by its physical characteristics, or recognized only by technical means, e.g. indicators. Other important aspects which influence the selection of parameter P include, for example:
a) speed with which the hazardous situation arises (e.g. quickly or slowly);
b) possibilities to withdraw from the hazardous situation (e.g. avoidance by escaping);
c) practical safety experiences relating to the process;
d) whether operated by trained and suitable operators;
e) operated with or without supervision.
When a hazardous event occurs, P1 should only be selected if there is a realistic possibility of avoiding or significantly reducing harm. Otherwise, P2 should be selected.
One possibility to determine P is the following approach:
– determine the letter of each factor of the Table A.1 that reflects the specific application (only one choice for each factor is possible);
– count the number of chosen letters “A”, “B” and “C”;
– determine the corresponding value of the parameter P in Table A.2.
The approach based on Table A.1 and Table A.2 should always be used with the following basic intention: P1 should only be selected if there is a realistic possibility of avoiding harm or of significantly reducing its effect; otherwise P2 should be selected
A.4 Overlapping hazards
When using this document, all hazards are considered as a specific hazard or hazardous situation. Each hazard can therefore be evaluated separately. When it is obvious that there is a combination of directly linked hazards which always occur simultaneously then they should be combined during risk estimation. The determination of whether hazards should be considered separately or in combination should be considered during the risk assessment of the machine. EXAMPLE 1 A continuous welding robot can create various simultaneous hazardous situations, e.g. crushing caused by movement and burning due to the welding process. This can be considered as a combination of directly linked hazards.
EXAMPLE 2 For a robot cell in which separate robots are working, for the cell areas where only one robot can create at the same time a hazard, the robots can be considered separately.
EXAMPLE 3 As a result of a risk assessment it can be sufficient for a rotary table with clamping devices to consider each clamping device separately.”
